







- Источник:
- Getty Images
Первые системы круиз-контроля появились еще в середине XX века, задолго до появления современных компьютеров, став едва ли не самым важным инструментом помощи водителю. С тех пор функционал круиз-контроля мало изменился: он все так же позволяет поддерживать постоянную скорость без необходимости удерживать ногу на педали газа. Водитель устанавливает желаемую скорость, и система автоматически поддерживает ее, что особенно удобно в длинных поездках по шоссе.
Круиз-контроль прост в использовании и помогает снизить утомляемость и износ двигателя. Тем не менее он неспособен реагировать на изменения в дорожной обстановке: если впереди возникнет препятствие или потребуется снизить скорость, водитель должен будет сделать это сам при помощи руления и торможения.

- Источник:
- Shutterstock/Fotodom.ru
Многие десятилетия спустя появилось своеобразное переходное звено между круиз-контролем и автопилотом — адаптивный круиз-контроль. Интеллектуальная система не только поддерживает заданную скорость, но и автоматически регулирует ее в зависимости от скорости движущегося впереди автомобиля, избегая столкновения, а также удерживает автомобиль в заданной полосе движения.
- Источник:
- Shutterstock/Fotodom.ru
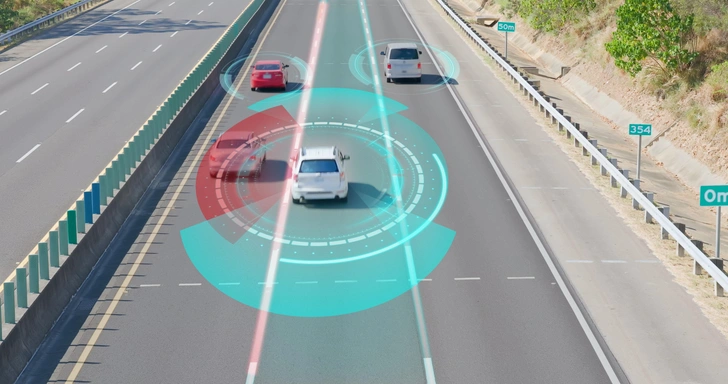
Такой результат достигается с помощью датчиков, которые отслеживают дорожную разметку и определяют расстояние до других транспортных средств. Если впереди движущаяся машина замедляется, адаптивный круиз-контроль автоматически снижает скорость автомобиля до безопасной, а затем по возможности восстанавливает ее до исходных значений. Эта система значительно повышает комфорт вождения, особенно в условиях оживленного городского трафика.
Венцом развития систем помощи водителю является автопилот. Он представляет собой более сложную систему, которая использует датчики, камеры и радары для анализа окружающей среды. В отличие от круиз-контроля, автопилот способен не только поддерживать скорость, но и гибко управлять автомобилем в различных условиях: самостоятельно менять полосы, тормозить перед препятствиями, маневрировать, останавливаться, пропускать пешеходов и др. Это достигается благодаря использованию алгоритмов машинного обучения и искусственного интеллекта, которые позволяют системе принимать решения на основе данных об актуальной дорожной ситуации.
Разница между круиз-контролем и автопилотом

- Источник:
- Shutterstock/Fotodom.ru
Основное отличие между автопилотом и круиз-контролем заключается в уровне автономности. Круиз-контроль требует постоянного внимания со стороны водителя и не может самостоятельно реагировать на изменения в дорожной ситуации, в то время как автопилот способен выполнять более сложные маневры, а самые продвинутые системы и вовсе не требуют участия водителя в управлении автомобилем. Тем не менее непреложным условием работы всех существующих систем помощи на дороге является внимание водителя: человеку необходимо удерживать руки на руле и следить за дорожной ситуацией даже при автономном вождении, что гарантирует оперативную реакцию на любые нестандартные дорожные ситуации.
Конечно, системы автопилота продолжают развиваться, и в будущем мы можем ожидать появления полностью автономных автомобилей, которые будут лишены даже классического рулевого управления. Так или иначе, на данный момент ни одна из существующих систем не может полностью заменить водителя, поэтому важно помнить, что ответственность за безопасность на дороге всегда остается за человеком.
